IMPACT: 一种用于快速 Contact-Implicit 轨迹优化的 Implicit Active-Set 增广拉格朗日方法¶
论文阅读笔记 — 用于后续讨论的概览
1. 基础信息¶
- 题目: IMPACT — An Implicit Active-Set Augmented Lagrangian for Fast Contact-Implicit Trajectory Optimization
- 作者: Jiayun Li, Dejian Gong, Georgia Chalvatzaki(PEARL Lab, TU Darmstadt / Hessian.AI / Robotics Institute Germany)
- arXiv 编号: 2605.09127 (submitted 2026-05)
- 项目主页: https://jonaspflaume.github.io/impact_info/
- 关键词: contact-implicit trajectory optimization (CITO), MPCC, augmented Lagrangian, active-set, block coordinate descent, CI-MPC, dexterous manipulation
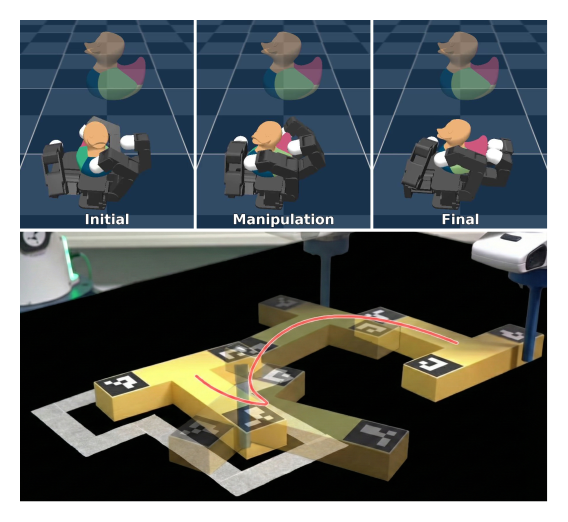 Figure 1:上图为 Allegro Hand 在仿真中实现对橡皮鸭的 in-hand reorientation;下图为 Panda 在真机上完成 Push-T 任务,红色曲线是物体原点轨迹。论文用同一算法把这两个差异巨大的任务(dexterous CI-MPC vs. long-horizon CITO)跑通。
Figure 1:上图为 Allegro Hand 在仿真中实现对橡皮鸭的 in-hand reorientation;下图为 Panda 在真机上完成 Push-T 任务,红色曲线是物体原点轨迹。论文用同一算法把这两个差异巨大的任务(dexterous CI-MPC vs. long-horizon CITO)跑通。
2. 文章介绍¶
2.1 解决的领域和问题¶
CITO(Contact-Implicit Trajectory Optimization)是用统一连续优化框架同时推理"何时建立/断开接触"以及"接触状态下的连续动力学"的方法,被广泛应用于操控(push、in-hand reorient)和足式运动。它本质上是一类 MPCC(Mathematical Program with Complementarity Constraints):用 \(0 \le G(x_t) \perp H(x_t) \ge 0\) 来表达"距离 vs 力"的互斥条件。
MPCC 的核心痛点:标准 NLP 求解器需要的 CQ(如 LICQ/MFCQ)在 complementarity 约束下系统性失效,KKT 条件失效,乘子可能 blow-up,初值敏感、数值脆弱。论文要解决的就是 — 在保留原始 nonsmooth complementarity 结构(不做 smoothing / relaxation)的前提下,提供一个数值稳健、有平稳点收敛保证、且工程上够快到能进 MPC loop 的求解器。
2.2 Motivation¶
主流处理 complementarity 的方法分为两类,各有缺陷:
- Smoothing / Relaxation(Scholtes、compliant contact):拿到光滑梯度但牺牲了 rigid-contact 的物理精度,relaxation 收紧时退化与坏条件数会回来。
- Penalty(squared penalty、CRISP 等):避免显式接触模式枚举,但大 penalty → stiff 子问题;启发式 continuation schedule → 收敛慢;用 IPOPT 解的话 wall-clock 仍然贵。
ADMM/C3 系列在多接触下扩展性好,但通常基于线性化动力学、产出任务空间命令、需要额外 tracking 层;难以直接处理 generalized coordinates 下的通用 MPCC。
作者提出第三条路:Safeguarded Augmented Lagrangian for MPCCs — 把等式与不等式约束扔给 AuLa(带 safeguard 的乘子/penalty 更新),但 complementarity 仍作为硬约束保留 在内层子问题里;内层用 BCD(X 块 Gauss-Newton;Y,Z 块 closed-form),借助这个 closed-form 步骤 隐式地 选择 contact branch。
2.3 之前工作的问题¶
| 类别 | 代表工作 | 缺陷 |
|---|---|---|
| Smooth/Compliant 接触模型 | Pang 2023, Suh 2022, Jin 2024 (cfree), Kurtz 2026 | 不严格满足 rigid 接触律;smoothing 程度强 → 控制振荡 / 偏差,弱 → 退化重新出现 |
| Scholtes Relaxation + NLP (IPOPT) | LCQPow, 经典 NLP | 需要 outer continuation \(t \downarrow 0\);越接近 0 子问题越难;warm-start 收益有限 |
| Squared Penalty + NLP | CRISP, Onol 2020 | penalty 调度启发式;大 penalty 让子问题 ill-conditioned;CRISP 在 Push-T 上要 1243 次迭代 |
| ADMM / Consensus (C3 family) | Aydinoglu 2022/2024, Bui 2025 (C3+) | 多基于线性化动力学;输出任务空间命令需额外 tracking;针对 QPCC 而非 general MPCC |
| Vanilla AuLa(把 complementarity 也吸进 AL) | — | 互补乘子无界 → 经典的 multiplier blow-up |
2.4 论文解决方案(一句话)¶
用 safeguarded AuLa 处理光滑等式/不等式约束、把 complementarity 保留为内层硬约束,再用 BCD(X: Gauss-Newton,(Y,Z): 闭式选 cone 分支)求解 — 既继承了 AuLa 的平稳点收敛保证,又通过 closed-form 分支选择获得 implicit active-set 的快收敛。
2.5 与前序工作的关系¶
- 算法基础直接建立在最近 MPCC-AuLa 理论(Guo 2022, Jia 2023, De Marchi 2023, Kanzow 2022)— 论文的贡献是把这套理论落地到 TO/MPC,外加专门设计的内层 BCD 求解器。
- 在 CITO 测试中和 CRISP(Li 2025)正面竞争(CRISP 是同期 penalty + continuation 的强 baseline)。
- 在 CI-MPC 测试中和 cfree(Jin 2024,smoothing + IPOPT)对比。
- 论文方法上和 Ménager 2025(hal-05201780,AuLa+BCD for QPCC inverse dynamics)思路接近,但 IMPACT 更早提交,且面向 temporally coupled general MPCC 而非单步 QPCC。
3. 方法介绍¶
3.1 形式化:MPCC 与 vertical 重写¶
原始 MPCC 形式(generalized coordinates,sum-of-squares 目标):
引入 slack \(Y, Z\),把非线性塞到光滑等式里,complementarity 落到简单 slack 变量上:
为什么这样改?\(0 \le y \perp z \ge 0\) 是两条 axis-cone 的并集,几何极其简单,可以对每个 scalar pair 独立、闭式更新;而 \(G(x_t), H(x_t)\) 中的非线性现在变成了普通光滑等式 \(G(x_t) - y_t = 0\),被 AuLa 自然处理。
3.2 Safeguarded AuLa Outer Loop¶
把 vertical 等式 \(\bar h_t := [h(x_t, x_{t+1});\, G(x_t)-y_t;\, H(x_t)-z_t]\) 和不等式 \(g_t\) 用 AuLa 吸收,complementarity 不进 AL,作为硬约束保留:
要点:
- 所有 penalty/multiplier 项都是平方型,叠到 \(r\) 上仍是 nonlinear least squares → 内层可以用 Gauss-Newton,免去 Hessian 计算。
- 乘子 \(\kappa, \mu\) 通过 clipping safeguard 到 \([\kappa_{\min},\kappa_{\max}]\)、\([0,\mu_{\max}]\),避免 vanilla AuLa-for-MPCC 的乘子 blow-up。
- penalty 更新是经典 safeguarded 规则:合并 feasibility + KKT 残差不下降 \(\eta\) 倍就 \(\rho \gets \gamma \rho\)。
收敛定理(Theorem 1,重述自 Guo 2022 / Jia 2023):在 safeguarded 乘子有界 + 内层残差 \(r_{\rm in}(w^k) \le \varepsilon_k \downarrow 0\) + MPCC regularity 的前提下,任何 feasible 累积点都是 MPCC 的一阶 stationary point(M-stationary)。
3.3 BCD Inner Solver¶
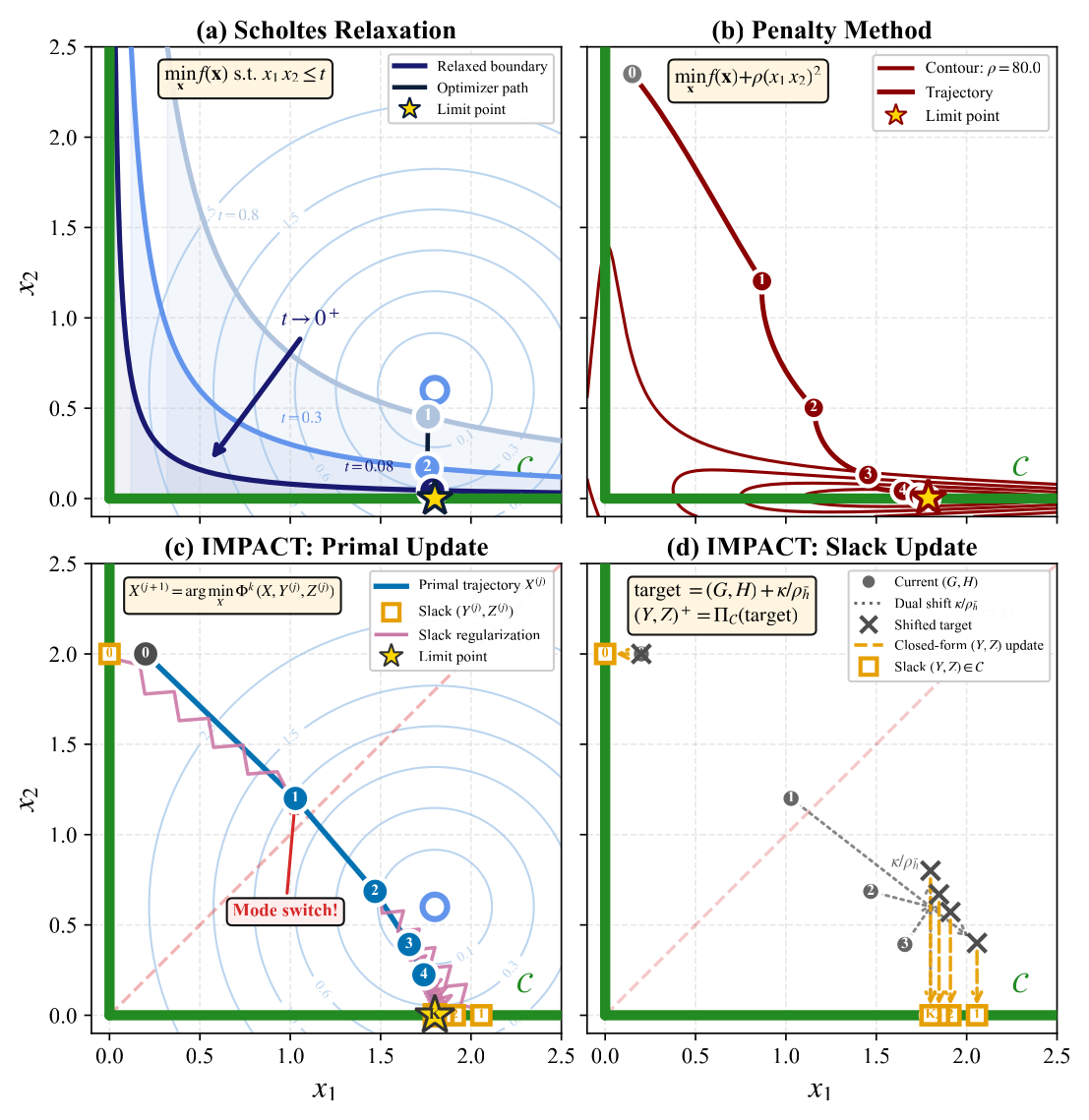 Figure 2:在二维 toy 问题上对比 Scholtes relaxation(左上)、squared penalty(右上)和 IMPACT。绿色是 complementarity 可行集(两条 axis 的并集),蓝色是目标函数等高线。IMPACT 把更新拆成两步:primal 更新(左下,受 slack 拖拽)+ slack 更新(右下,从 dual-shifted target 投影到 complementarity 集)。slack 像"弹簧锚点"把 primal 拉到合法 branch 上,而不是单纯做 feasibility projection。
Figure 2:在二维 toy 问题上对比 Scholtes relaxation(左上)、squared penalty(右上)和 IMPACT。绿色是 complementarity 可行集(两条 axis 的并集),蓝色是目标函数等高线。IMPACT 把更新拆成两步:primal 更新(左下,受 slack 拖拽)+ slack 更新(右下,从 dual-shifted target 投影到 complementarity 集)。slack 像"弹簧锚点"把 primal 拉到合法 branch 上,而不是单纯做 feasibility projection。
Block 1 (X-update):固定 \((Y,Z)\) 后内层目标是光滑 NLS,作者用 damped Gauss-Newton + Armijo backtracking 解。
Block 2 ((Y,Z)-update):固定 \(X\) 后每个 scalar pair \((y_{t,i}, z_{t,i})\) 在 \(\{(y,0)| y\ge0\}\cup\{(0,z)|z\ge0\}\) 上做精确最小化:
- Case 1 \((z=0)\): \(y^\star = \max(0,\, G_i(x_t) + \tfrac{1}{\rho_{\bar h}}\kappa_{G,t,i})\)
- Case 2 \((y=0)\): \(z^\star = \max(0,\, H_i(x_t) + \tfrac{1}{\rho_{\bar h}}\kappa_{H,t,i})\)
比较两个 case 的目标函数值(其实就是两个 quadratic penalty 项),取小的那一支。这就是"implicit active set"的含义 — 每次 BCD sweep 都隐式地选择 contact / no-contact 分支,但不需要外层 mode enumeration 也不需要 homotopy schedule。
与 ADMM 投影(Bui 2025)的对比(论文 Remark):ADMM 直接把 copy 变量投到可行集,纯 feasibility 驱动;IMPACT 的 slack update 是 dual-shifted projection — 把当前乘子/penalty 的影响注入 slack,像弹簧力一样把 primal 拽过来。
Theorem 2:在 \(\Phi^k\) 光滑+下有界、X-step 有 sufficient decrease、(Y,Z)-step 是精确最小化的前提下,BCD 在有限步内可把 \(r_{\rm in}\) 压到任意 \(\varepsilon_k\) 以下。这就给外层 AuLa 提供了所需的"attainability"接口。
实际实现里用的不是 \(r_{\rm in}\) 测试,而是 目标函数 stagnation: \(|\Phi^k(w^{(j)}) - \Phi^k(w^{(j+1)})| \le \tau_k\) 就停("inexact/budgeted inner solve")。
3.4 Implementation Details¶
- 硬件: AMD Ryzen 9 7950X3D,无 GPU,无显式多线程(不用 OpenMP/TBB)。
- 库: BLAS/LAPACK + Eigen sparse LDLT(线性求解)+ Eigen SIMD(slack 更新)+ CasADi C++(建模与符号微分,没用 CasADi CodeGen)。
- CITO 超参(典型): \(\rho\) scaling factor 1.1–1.5,multiplier safeguard \(10^6\),外层 tol \(10^{-5}\),max outer iter 1000,max inner iter 10–50,Newton tol \(10^{-6}\)。
- Allegro CI-MPC 超参: 单 shooting,horizon \(N=4\),control bound \(\pm 0.1\),frame skip 50,contact Jacobian 只在初始状态算一次(与 cfree 一致),\(\rho_{\max}=10^3\),\(\rho\) scale 5.0,max outer 10,max inner 5。
- MPC 控制频率: Allegro 任务 9.53 Hz(cfree 是 50.6 Hz),CITO Push Box 平均 0.15 s/solve。
4. 结果对比¶
4.1 CITO Benchmark(CRISP suite,全 0 初始化)¶
每个任务 50 个随机 goal/start-goal,统一终止准则:所有约束违反 \(< 10^{-5}\)。红色=最优,蓝色=次优。
| 任务 | Solver | Success | Track. Err. ↓ | Iters ↓ | Time (s) ↓ |
|---|---|---|---|---|---|
| Push Box | SR | 100.0% | 19.46±2.30 (红) | 164±12 (蓝) | 1.27±0.10 |
| PM | 98.0% | 58.00±5.11 | 66±13 (红) | 0.85±0.17 (蓝) | |
| CRISP | 100.0% | 51.90±4.08 | 641±358 | 2.52±1.34 | |
| IMPACT | 100.0% | 26.99±2.81 (蓝) | 219±49 | 0.15±0.03 (红) | |
| Push T | SR | 100.0% | 1.24±0.13 (红) | 202±11 (蓝) | 5.50±0.38 |
| PM | 90.0% | 21.99±2.57 | 117±14 (红) | 2.96±0.39 (蓝) | |
| CRISP | 100.0% | 8.03±0.71 (蓝) | 1243±407 | 25.73±6.92 | |
| IMPACT | 100.0% | 8.48±1.94 | 606±225 | 1.03±0.44 (红) | |
| Cart Transport | SR | 100.0% | 433.08±44.92 | 261±22 | 5.63±0.57 |
| PM | 100.0% | 408.65±42.32 | 87±14 (红) | 2.00±0.32 (蓝) | |
| CRISP | 100.0% | 235.10±21.70 (红) | 501±381 | 2.72±2.05 | |
| IMPACT | 100.0% | 381.89±32.35 (蓝) | 101±15 (蓝) | 0.08±0.01 (红) |
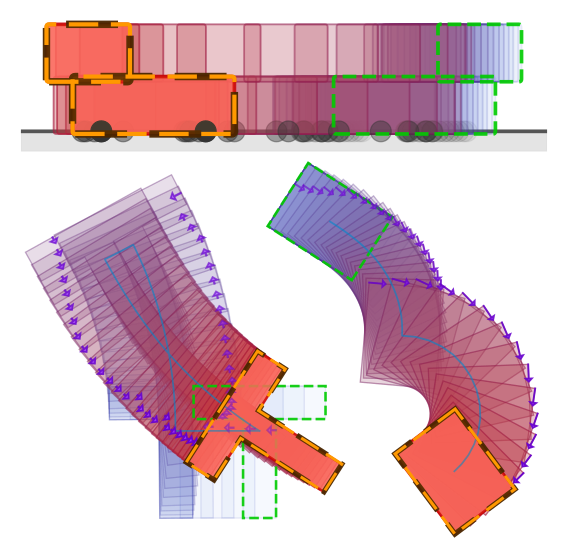 Figure 3:IMPACT 在三个 CITO 任务上的轨迹示例 — Push Box / Push T / Cart Transport。绿色虚线框是起点,橙色虚线框是终点,紫色箭头是接触力,绿色实线是物体原点轨迹,颜色从浅蓝渐变到深橙表示时间推进。Push T 的非凸性带来更复杂的 mode landscape。
Figure 3:IMPACT 在三个 CITO 任务上的轨迹示例 — Push Box / Push T / Cart Transport。绿色虚线框是起点,橙色虚线框是终点,紫色箭头是接触力,绿色实线是物体原点轨迹,颜色从浅蓝渐变到深橙表示时间推进。Push T 的非凸性带来更复杂的 mode landscape。
速度结论: 相对 CRISP 速度提升 \(16.8\times / 25.0\times / 34.0\times\)(geomean \(24.3\times\));相对最快 baseline PM \(5.7\times / 2.9\times / 25.0\times\)(geomean \(7.4\times\));总 range \(2.9\times\)–\(70\times\),geomean 13.8×。
质量结论: 速度领跑但 tracking error 不是最优。SR 在 Push Box / Push T 上质量明显更好(Push T 尤其差距大:1.24 vs 8.48);CRISP 在 Cart Transport 上最好。IMPACT 是个 quality–speed trade-off — 适合 MPC 这种"快"比"完美轨迹"重要的场景。
4.2 Allegro Hand CI-MPC Benchmark(cfree, Jin 2024,17 objects)¶
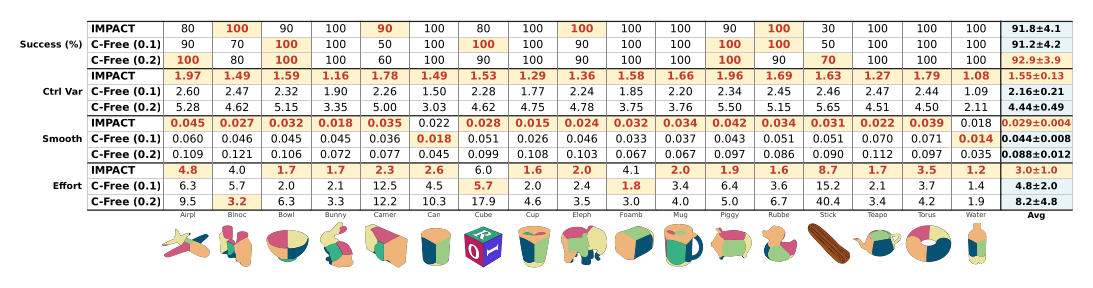 Figure 4:17 个物体上的 in-hand reorientation 评测,对比 IMPACT、cfree(±0.1)、cfree(±0.2)。指标包括 success rate、control variance、smoothness、control effort。控制带宽扩大(±0.2)能让 cfree 维持成功率但显著恶化 control quality — 这是 smoothing-based 接触模型在闭环里振荡的特征。
Figure 4:17 个物体上的 in-hand reorientation 评测,对比 IMPACT、cfree(±0.1)、cfree(±0.2)。指标包括 success rate、control variance、smoothness、control effort。控制带宽扩大(±0.2)能让 cfree 维持成功率但显著恶化 control quality — 这是 smoothing-based 接触模型在闭环里振荡的特征。
| Metric | IMPACT | cfree(±0.1) | cfree(±0.2) |
|---|---|---|---|
| Success rate | 91.8%±4.1 | 91.2%±4.2 | 92.9%±3.9 |
| Control variance ↓ | 1.55±0.13 | 2.16±0.21 | 4.44±0.49 |
| Smoothness ↓ | 0.029±0.004 | 0.044±0.008 | 0.088±0.012 |
| Control effort ↓ | 3.0±1.0 | 4.8±2.0 | 8.2±4.8 |
| MPC steps to success | 66.5±10.9 | 71.4±13.5 | 57.8±14.6 |
| Control rate (Hz) | 9.53±0.36 | 50.6±0.86 | 54.0±1.30 |
结论: 成功率持平,控制质量全面更优(variance/smoothness/effort 都更低),但控制频率只有 cfree 的 1/5。论文把这定位成"我们没 smoothing 也能跑到 10 Hz"的工程可行性 demo,而不是"我们比 cfree 快"。
Stick 物体失败: IMPACT 在 stick 上明显比 cfree 差。论文归因于 LCP 模型对 slender geometry 高度敏感(频繁 mode switching)。
4.3 真机 Push-T(Panda,10 trials)¶
先离线求 full-horizon TO,机器人执行 reference;偏离则在线 replan。Sim-to-real 通过 tune 旋转 contact-radius 实现。10/10 成功。这是定性 demo 而非系统评测。
4.4 关键消融¶
论文未提供专门的 ablation 表(无"去掉 safeguard"、"换成 ADMM 投影"、"无 GN"等正式消融)— 这是评测部分最大的弱点之一(详见 §5.2)。
5. 引申问题 / 讨论¶
5.1 做得好的地方¶
- Vertical 重写让 nonlinearity 和 complementarity 解耦:把 \(G(x), H(x)\) 的非线性扔到光滑等式里,让 complementarity 只作用在 axis-aligned 的 slack 变量上 — 这是后续 closed-form (Y,Z) 更新得以成立的根基。等式约束多了 \(2|\text{pairs}|\) 维,但被 AuLa 吸收得很自然。
- Complementarity 留作硬约束、不进 AL:直接规避了 vanilla AuLa-for-MPCC 里乘子 unbounded 的病。这是 Guo 2022/Jia 2023 理论的精髓,IMPACT 把它工程落地。
- SOS 目标 + AuLa = Gauss-Newton 友好:所有 penalty / multiplier 项都是平方型,能直接叠进 \(r\) 形成 NLS,免去显式 Hessian,对 TO 这种高维稀疏问题至关重要。
- Closed-form (Y,Z) 是"branch picker",但带 dual shift:和 ADMM 的纯 feasibility 投影相比,注入了乘子/penalty 的"弹簧力",能 actively 把 primal 拽向当前 active mode,因此实际收敛速度比纯 projection 快得多(Figure 2 的可视化很有说服力)。
- C++ 实现里有大量工程心思:没用 GPU、没用多线程、没用 CasADi CodeGen,但通过 sparse LDLT + Eigen SIMD 把 BCD sweep 做得极快 — Push Box 一次 solve 仅 0.15 s。这个 vanilla CPU baseline 本身就是有价值的对照实验。
- 统一框架同时跑 long-horizon CITO 和 high-dim CI-MPC:同一个 solver 既能解 \(T=300\) 的 Cart Transport,又能在 10 Hz 跑 22-DOF Allegro hand 的多接触 MPC,框架的通用性确实展示了。
5.2 做得不够好的地方 / 值得质疑的地方¶
- Tracking quality 在 Push T 上明显输给 SR(8.48 vs 1.24,7× 差距)。论文把这归为 "quality-speed trade-off",但这种 trade-off 在 MPC 里能否接受要看场景。如果下游需要高保真轨迹(e.g. 真机精细操控),IMPACT 直接拿"几何接触模型 + LCP"出来的解不一定够用。
- 没有真正的 ablation。论文宣称的速度提升来自至少 4 个独立来源:(a) AuLa 框架本身(vs penalty);(b) closed-form (Y,Z) 更新(vs Newton 步);(c) Gauss-Newton 内层(vs IPOPT 的 IPM);(d) C++ vanilla 实现的高质量。论文没拆开任何一个。无法回答"如果把 CRISP 也用同样的 C++/Eigen 写一遍,差距还有多大?"或"换成 projected Newton 在 (Y,Z) 上是否更快?"
- CI-MPC 9.53 Hz vs cfree 50+ Hz 的鸿沟被淡化。论文重心放在"control quality 更好"上,但 5× 频率差在实际闭环稳定性里不是 cosmetic — 很多硬件平台需要 30+ Hz 才能稳定 in-hand 操控。论文应当承认这是个真实 gap,而不是用"我们没 smoothing"作为豁免。
- MPCC regularity 条件是定理 1 的核心前提,但论文未讨论它在典型接触问题里何时成立。M-stationarity 的"feasible accumulation point 存在"也只是假设。读者难以判断算法在真实任务里到底有多 robust,只能看实验。
- All-zero 初始化对其他 baseline 也是"标准",但 IMPACT 是否能 warm-start 收益更大没测。MPC 默认 warm-start;如果 SR/CRISP 在 warm-start 下显著缩小 iter count,那 IMPACT 的 wall-clock 优势可能也会缩小。论文自己也承认 "the relative advantage of IMPACT may differ in such settings"。
- Allegro 实验在 stick 上失败,归因 "LCP + slender geometry sensitivity",但这同时也暴露了 BCD 在 mode 频繁切换下的不稳定性。论文 Limitations 里也提到"transient regime before contact is firmly established, optimizer may switch between nearby contact sets"。换言之,implicit active-set 本身在硬切换时不一定收敛 — 没有 hysteresis / trust-region 兜底。
- 缺少与 C3 / ADMM 系列的直接对比。Related Work 里大段讨论 ADMM/C3+,并解释了"它们和我们不一样",但 Push-T / Cart Transport 这类问题 C3+ 是有现成 baseline 的,理应跑一遍。否则读者只能信任 narrative。
- Allegro 任务依赖 "contact-encouraging cost"(来自 Jin 2024)。这是手工启发式,论文复用了它而没自己消除依赖 — Limitations 里承认这一点,但承认了不等于解决。意思是:speedup 一部分来自 baseline 本身已 tune 好的 cost。
- frozen Jacobian + 单 shooting 在 CI-MPC 里是个真实但被淡化的近似。短 horizon \(N=4\) 下勉强 work;如果 horizon 拉长(足式运动场景常需要),这个近似会显著降质,不知 IMPACT 是否还能保持优势。
- "\(2.9\times\)–\(70\times\) 提升"中的高端值(70×)很可能来自单一 unfavorable baseline-task 组合。Geomean 13.8× 是更 honest 的数字,但 abstract / conclusion 反复强调 70× 容易误导。
5.3 值得继续探讨的方向¶
- 第二阶 (Y,Z) 更新:当前是 closed-form scalar projection,但若引入 cross-block curvature(projected Newton over union of cones),收敛常数可能进一步降低 — 论文 commented-out 段提到过 BCD-derived Newton 方向作为 future work。
- Hysteresis / trust-region on mode updates 解决 stick 等 slender 物体的频繁切换问题(论文 Limitations 也指出)。
- Warm-start + receding horizon MPC 真机部署:当前真机只是离线 TO + tracking,让 IMPACT 直接作为 closed-loop CI-MPC 跑在 Allegro 真机上是自然下一步。
- 和 C3+ 在 planar pushing 上的正面对比:缺失这个就难以定位 IMPACT 在 ADMM 一族中的位置。
- Offline RL 提供 global guidance + IMPACT 做 local 精修:作者自己提到这个组合方向,能缓解对 contact-encouraging cost 的依赖。
- Conic(second-order cone)friction 模型:论文目前用 polyhedral friction → LCP;提到了 cone-complementarity 也 fit 这个 framework 但更难,验证一下扩展性。
- 真正的 ablation matrix:(a) AuLa vs Penalty in same C++ code;(b) closed-form vs projected Newton vs ADMM proj;(c) GN vs IPOPT inner;(d) C++ vs Python baseline — 能让"速度提升来自哪里"这个核心问题有答案。
- 多线程 / GPU 加速 (Y,Z) sweep:scalar pair 间天然 embarrassingly parallel,作者明确说"目前没多线程",这是 free 的 future work。
- 平稳点之外的二阶充分条件:M-stationary 只是必要条件;能不能 detect 真正的局部最优(甚至 escape spurious stationarity)?
参考资源¶
- 论文 PDF: paper.pdf
- LaTeX 源码: source/
- 项目主页: https://jonaspflaume.github.io/impact_info/
- 关键相关工作:
- CRISP — Li et al., 2025(penalty-based CITO,主要 baseline)
- cfree — Jin et al., 2024(smoothing + IPOPT CI-MPC,Allegro benchmark 来源)
- C3 / C3+ — Aydinoglu 2022, Bui 2025(ADMM 系列,未对比)
- LCQPow — Hall 2025(penalty for QPCC)
- AuLa-for-MPCC 理论:Guo 2022, Jia 2023, De Marchi 2023, Kanzow 2022